Общие сведения о передаче данных
Общие сведения о передаче данных

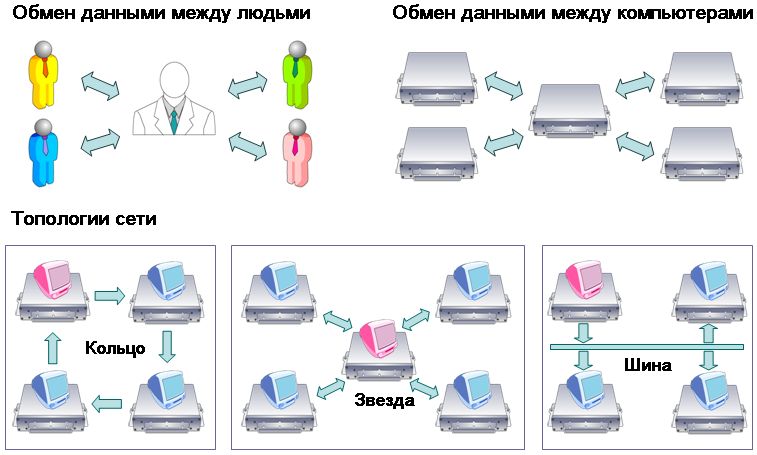
В общем смысле коммуникация (или передача данных) предполагает обмен информацией. Хорошо известно, как происходит коммуникация между людьми. Она включает кодирование, передачу и декодирование осмысленных сообщений с помощью языка. В мире существует множество различных языков. Помимо языковых коммуникаций между людьми существуют и другие способы коммуникаций. Коммуникации происходят также между электрическими приборами, например, электронными блоками управления для обмена данными. Передача данных между несколькими компьютерами осуществляется посредством сети.
При передаче данных между компьютерами в рамках сети используется некий общий язык (правила передачи данных), называемый протоколом. Более подробное описание протокола будет приведено далее. Независимо от способа передачи данных сетевые системы могут иметь различную топологию, такую как кольцо, звезда или шина.
Параллельная передача данных
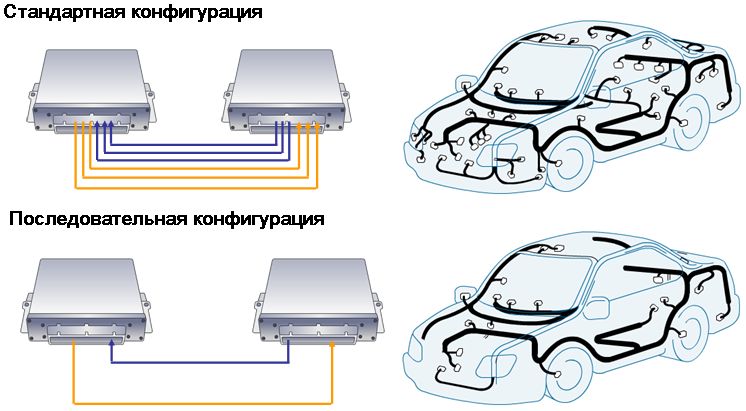
До настоящего времени большинство систем взаимодействовали друг с другом посредством специально предназначенных для этой цели проводов, т. е. для передачи каждого типа сигнала использовался отдельный провод. Требования обеспечения безопасности, комфортности и охраны окружающей среды приводят к необходимости расширения взаимодействия отдельных систем (блоков управления). А для этого необходимо все больше проводов и разъемов. Например, для обеспечения надлежащего управления антиблокировочной и антипробуксовочной системой блок управления ABS/TCS должен обмениваться данными с блоком управления двигателем. По мере роста количества систем и объемов информации возникает несколько проблем. Увеличение количества проводов приводит к росту стоимости, провода занимают все больше места, а кроме того, вследствие большого количества разъемов повышается вероятность отсутствия контакта или ненадежного контакта. Поскольку электрическая начинка современных автомобилей становится все более сложной, необходимость объединения устройств в сеть становится еще очевиднее. Например, некоторые автомобили класса «люкс» содержат более 5 км проводов весом около 100 кг. А количество разъемов становится просто пугающим с точки зрения надежности. Чтобы справиться со всеми этими проблемами, в настоящее время применяется последовательная передача данных. Поскольку в этом случае количество соединительных проводов значительно меньше требуемого количества сигналов, данные передаются последовательно в виде пакетов данных.
Побитная передача данных
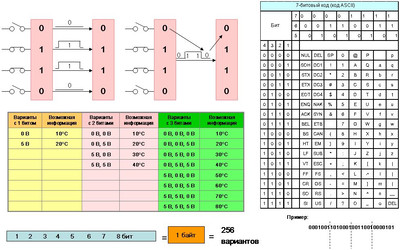
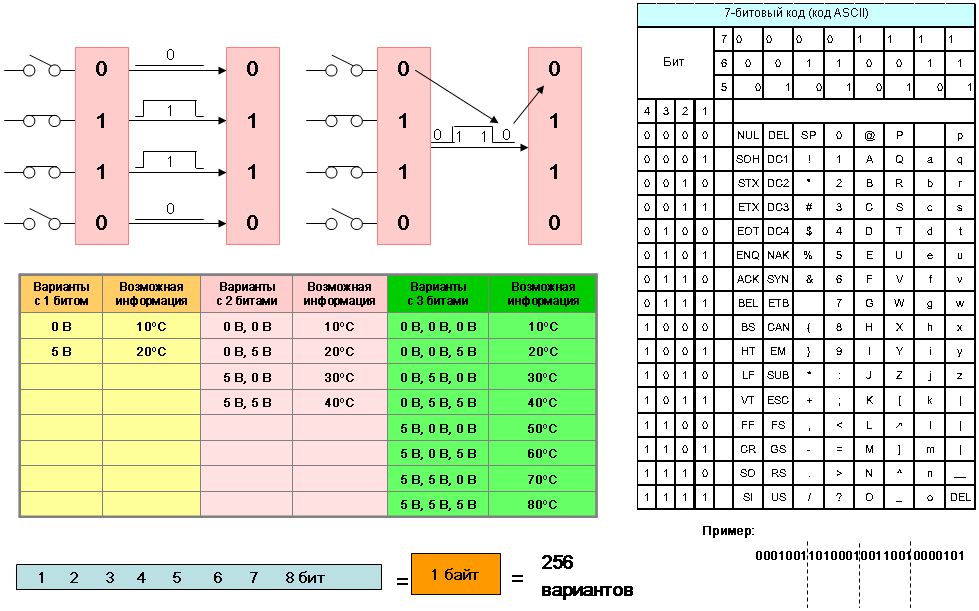
При пакетной передаче данных необходимо обмениваться данными по частям с использованием цифровых сигналов или, говоря техническим языком, побитно. В традиционной системе каждый элемент информации передается непосредственно с одного ЭБУ на другой по отдельным проводам через выделенные контакты. При последовательной передаче данных информация преобразуется в биты, представляющие собой логические (цифровые) сигналы. Такие сигналы имеют только два состояния: включено или выключено, 1 или 0, длинный или короткий и т. д. Один сигнал с двумя возможными состояниями представляет собой минимальную единицу информации и называется битом (двоичная единица информации). В виде последовательности битов можно передавать любые данные. В примере выше состояние переключателей «выключено, включено, включено, выключено» преобразовано в последовательность битов 0110 и передано по сети. После получения пакет битов 0110 преобразуется обратно в сведения о состоянии переключателей, при этом 0 означает выключенное состояние, а 1 — включенное. Поскольку между блоками управления происходит обмен большим объемом данных, необходимо выделить определенное количество бит для передачи требуемой информации между различными системами. Посмотрим, сколько информации можно передать с помощью определенного количества бит. В качестве примера рассмотрим передачу сведений о температуре. Один бит позволяет передать только два различных значения, 2 бита — 4 значения, а 3 бита — уже 8 значений. Каждый дополнительный бит удваивает количество информации. Поскольку между блоками управления происходит обмен большим объемом данных, необходимо выделить определенное количество бит для передачи требуемой информации между различными системами. Посмотрим, сколько информации можно передать с помощью определенного количества бит. Чтобы лучше уяснить принцип, воспользуемся таблицей 7-битных кодов ASCII (American Standard Code for Information Interchange) и преобразуем сообщение, представленное в битах, в понятное слово. Получаем, что последовательность битов 0001001101000100110010000101 соответствует слову HELP. Кроме того, можно использовать эту таблицу для обратного преобразования. Например, слову END соответствует последовательность 101000101110010010001.
Технология создания битов
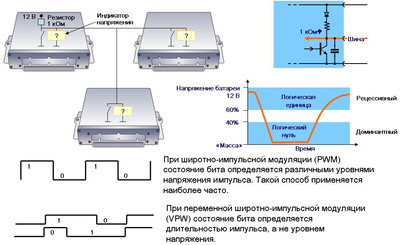
В сущности, для передачи данных можно использовать любой метод, который позволяет создавать два различных состояния сигнала. В автомобилях для представления двоичных цифр 1 и 0 чаще всего применяются два различных уровня напряжения, но это не является обязательным требованием. Например, в некоторых системах для передачи данных используются световые сигналы: свет включен = 1, свет выключен = 0. Кроме того, можно использовать длительность сигнала. В этом случае кратковременный импульс может представлять 1, а более длительный сигнал — 0. Условия, которые представляют 0 или 1, можно выбрать произвольно. Например, напряжение 12 В может соответствовать 1, а 0 В — 0. Но можно сделать и наоборот, т. е. 12 В = 0, а 0 В = 1. В большинстве случаев для передачи данных используются сигналы высокого или низкого напряжения. Давайте рассмотрим, как это реализуется технически. Для упрощения понимания в примере ниже используется источник питания, резистор, простой выключатель и индикатор напряжения. Если все выключатели разомкнуты, на все индикаторы напряжение подается через резистор. Каждый индикатор будет обнаруживать на линии передачи данных напряжение 12 В, которое представляет единицу. На рисунке справа один выключатель замкнут, он замыкает резистор на «массу». Поэтому напряжение на шине упадет до 0 В, что соответствует 0. На самом деле в микросхемах используются транзисторы, но общий принцип остается таким же. В сетевой системе возможны два различных состояния бита: он может иметь приоритет (и называется в этом случае доминантным) или не имеет приоритета (и называется рецессивным). Это означает, что доминантный бит подавляет рецессивный. Доминантный уровень используется для обеспечения приоритета сигнала важных сообщений. При широтно-импульсной модуляции (PWM) состояние бита определяется различными уровнями напряжения импульса. Такой способ применяется наиболее часто.
При переменной широтно-импульсной модуляции (VPW) состояние бита определяется длительностью импульса, а не уровнем напряжения.
Кадр данных и протокол

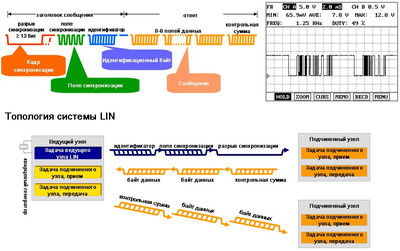
Очевидно, что для обеспечения надлежащего обмена данными между различными устройствами недостаточно только уметь создавать последовательности битов. Необходимы и другие правила. Сравните два предложения на слайде. Несмотря на одинаковое содержимое обоих предложений, второе предложение значительно удобнее читать. Как вы увидели на примере простого предложения, для упрощения понимания важно знать, где начинается или заканчивается сообщение. В битовых последовательностях изменение начальной точки или длины пакета данных приведет к изменению всего сообщения. Если определенное сообщение состоит из 10 бит и начинается с первого бита последовательности, приведенной на слайде, получим следующее сообщение: 1101011000. Если первые 2 бита относятся к предыдущему сообщению, а новое сообщение начинается с бита 3, получим сообщение 0101100011. Это сообщение совершенно отлично от предыдущего. Поэтому блоки управления должны знать, где находятся начальная и конечная точки сообщения. Доступное место от начала до конца одного сообщения называется кадром данных. Кадр данных определяет не только начальную и конечную точки сообщения, но также и структуру сообщения. В примере на слайде показана типичная структура кадра данных, состоящего из заголовка, полей данных и конца сообщения. Заголовок может содержать такую информацию, как адрес отправителя, адрес получателя, приоритет сообщения и стартовый бит. Поля данных содержат фактическую передаваемую информацию. В различных системах кадр данных может содержать одно или несколько полей данных. Блок конца сообщения может содержать контрольное поле для проверки правильности передачи и стоповый бит. Структура кадра данных зависит от конкретной сети и протокола.
Протокол
Протокол определяет все необходимое для правильной передачи и приема данных. Он описывает не только формат кадра данных, но и способ связи (проводная или беспроводная), используемую частоту и уровень напряжения, а иногда даже и форму разъема и многое другое. Подробные сведения о сети автомобиля приведены либо в спецификациях SAE или DIN/ISO для стандартных систем, либо определяются производителем для специализированных систем. Международная организация по стандартизации (ISO) разработала модель OSI (модель взаимодействия открытых систем), в которой для точного описания любых коммуникационных сетей или систем используются 7 областей передачи данных по сети (так называемые уровни). Каждый уровень отвечает за определенный аспект передачи данных. Например, физический уровень определяет разводку проводов, используемые напряжения и т. д. В конкретной сети могут присутствовать не все уровни. Очень часто при передаче данных в автомобиле используются только уровни 1, 2 и 7.
Классификация методов последовательной передачи данных
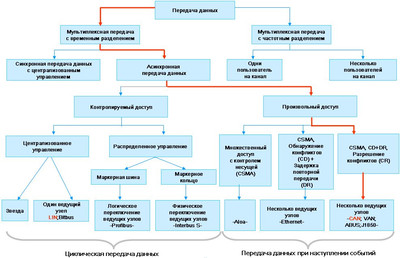
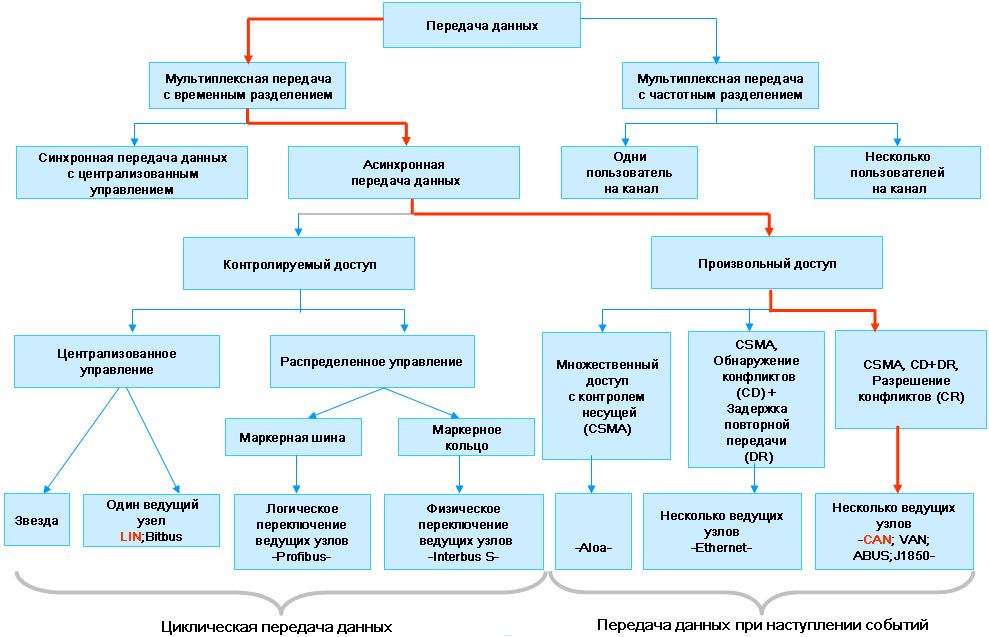
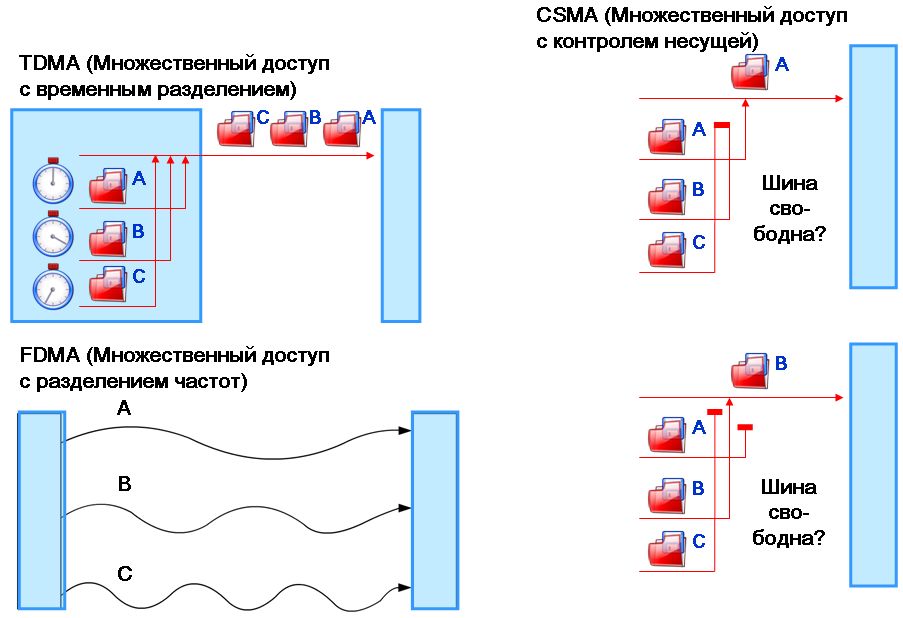
Мультиплексная передача с частотным разделением: передача данных осуществляется в виде сигналов с различной частотой, что позволяет отличать их друг от друга.
Мультиплексная передача с временным разделением: передача данных осуществляется в определенный интервал времени, называемый временным кадром. Как будет показано далее, в этом случае каждому блоку управления выделяется определенный интервал времени, в течение которого он может отправлять данные. Временные кадры могут быть фиксированными и назначенными для определенных ЭБУ, которые всегда отправляют данные в одной последовательности. В этом случае сообщения отправляются постоянно, поэтому стартовые и стоповые сигналы не требуются. Вместо этого для обеспечения синхронизации всех ЭБУ требуется использовать тактовый сигнал. Поэтому такой метод называется синхронной или циклической передачей данных.
Другой метод — так называемая асинхронная передача данных. Такой метод подразумевает передачу данных только тогда, когда это необходимо. Поэтому иногда его называют передачей данных при наступлении событий. В этом случае не используются фиксированные временные кадры или тактовые сигналы. Поскольку потенциально несколько ЭБУ могут попытаться одновременно отправить сообщение, необходимо управлять доступом этих устройств к шине. Один из методов, используемых для этой цели, — концепция одного ведущего узла, в которой доступом к шине управляет один ЭБУ. Другой метод — концепция нескольких ведущих узлов, в которой каждый блок управления имеет право получать доступ к шине в любое время. В этом методе, называемом CSMA, ЭБУ проверяет наличие сообщения на сигнальной шине.
Методы управления доступом к сети

CSMA (Carrier Sense Multiple Access, множественный доступ с контролем несущей). Блоки управления следят за состоянием шины. Если шина свободна, блок управления начнет отправку сообщения. Если другой блок управления уже начал отправку сообщения, возможны различные варианты разрешения конфликта.
Обнаружение конфликтов и задержка повторной передачи
Например, если два блока управления попытаются одновременно отправить сообщение, возникнет конфликт. Он будет обнаружен обоими ЭБУ, и оба ЭБУ остановят отправку и возобновят попытку через некоторое время задержки, выбираемое случайным образом. Недостаток этого метода заключается в том, что за период времени между моментом обнаружения конфликта и повторной передачей может накопиться множество других сообщений, что может привести к сбою системы. Кроме того, этот метод нельзя использовать для систем обеспечения безопасности, поскольку неизвестно точное время отправки каждого сообщения.
Обнаружение и разрешение конфликтов
В этом случае протокол обеспечивает отправку сообщений с самым высоким приоритетом и задержку остальных сообщений. Такой процесс называется произвольным доступом. Сведения о приоритете входят в состав заголовка сообщения. Более подробно этот вопрос будет рассмотрен в разделе, посвященном шине CAN.
Конфигурации сети

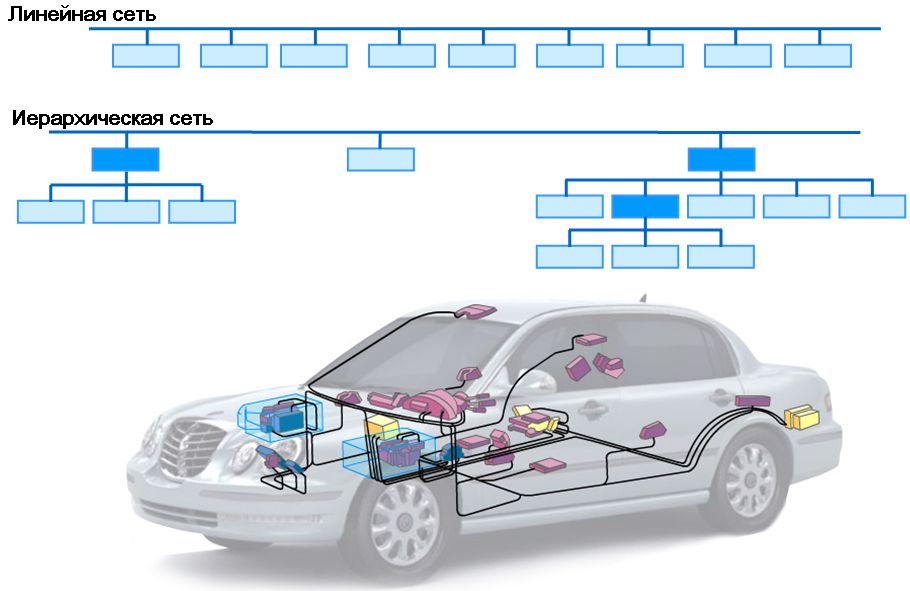
Существуют две основных конфигурации локальных сетей: линейная и иерархическая. В иерархической сети в каждой точке соединения различных шин необходимо использовать так называемый шлюз. Шлюз преобразует сообщения одного протокола в другой. В иерархической системе может быть один или несколько подуровней. Основными причинами использования такой конфигурации являются сокращение расходов за счет использования более медленных и простых шин и сокращение загрузки основной шины. Как правило, подсистемы обеспечивают меньшую скорость передачи данных.
Классификация по скорости передачи данных

Классификация сетевых систем по скорости передачи данных согласно SAE
Класс A: низкая скорость (менее 10 кбит/с)
Применяется для функций обеспечения комфорта, таких как аудиосистема, бортовой компьютер, электростеклоподъемники и т. д.
Класс B: средняя скорость (10-125 кбит/с)
Применяется для передачи общей информации, такой как информация на приборной панели, скорость автомобиля и т. д.
Класс C: высокая скорость (125 кбит/с – 1 Мбит/с)
Управление в режиме реального времени, например управление трансмиссией, динамика автомобиля и т. д.
В классификации DIN/ISO предусмотрены только 2 категории:
низкая скорость — до 125 кбит/с
высокая скорость — более 125 кбит/с
Синхронная передача данных
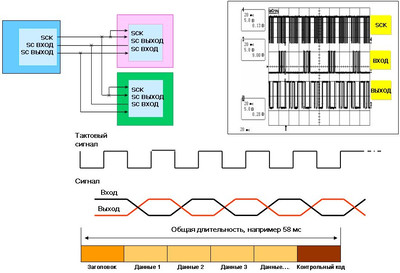
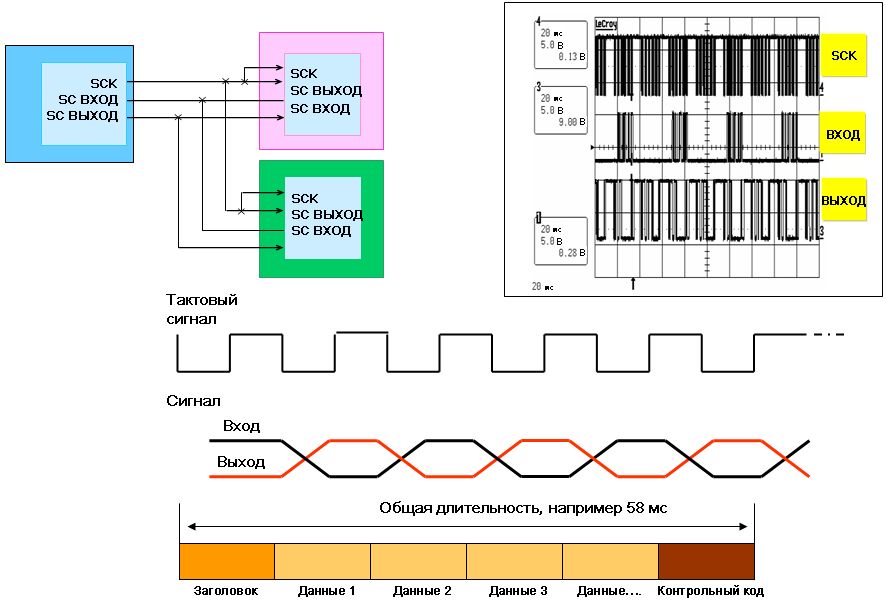
Как уже говорилось ранее, существуют два основных метода последовательной передачи данных: синхронная и асинхронная передача. В случае синхронной передачи данных связанные устройства производят инициализацию друг друга, а затем непрерывно передают данные, чтобы обеспечить синхронизацию. Иногда для передачи так называемого тактового сигнала выделяется специальная линия. Вследствие того, что передача данных между устройствами происходит постоянно, начальные и стоповые сигналы не требуются. В типичной системе синхронной передачи данных кроме линий передачи данных также присутствует линия синхронизации. Передача данных происходит периодически, т. е. каждому ЭБУ выделяется фиксированный интервал времени, в течение которого он может передавать свои данные. По этой причине необходимо обеспечить синхронизацию всех ЭБУ. Синхронизация осуществляется с помощью тактового сигнала. Как правило, используются три линии: одна для тактового сигнала, а две другие для передачи данных. В данном примере блок данных 1 может представлять систему ETACS, блок данных 2 — ЭБУ двери пассажира и т. д. Этот кадр данных будет передаваться регулярно с интервалом 58 мс даже в тех случаях, когда новые данные не поступают. В этом случае сообщение останется без изменений. Однако для синхронной передачи данных необязательно использовать три линии. Также можно применять двухпроводную линию связи и использовать одну линию для тактового сигнала, а другую для передачи данных. Существуют системы даже всего с одной линией. В этом случае синхронизация осуществляется с помощью специального блока сообщения, так называемого поля синхронизации. Примером такого метода служит шина LIN, в которой соответствующая информация находится в определенной части сообщения.
Асинхронная передача данных

Второй метод — асинхронная передача данных. В этом случае передача данных происходит только тогда, когда это необходимо. Из-за отсутствия постоянного обмена данными необходимо использовать стартовый и стоповый биты. Когда требуется начать передачу данных, состояние линии изменяется с 1 на 0 (стартовый бит). В типичной системе асинхронной передачи данных имеется только линия передачи данных, но нет отдельной линии синхронизации. Форма сигнала и кадр данных имеют аналогичный вид. Важное отличие заключается в том, что кадр данных включает стартовый и стоповый биты. Линия передачи данных может состоять из одной линии или двух линий, как в примере на слайде. В этом случае для кодирования данных используется разность напряжений между двумя линиями. Например, отсутствие разности напряжений может представлять значение бита 1, а ее наличие — 0.
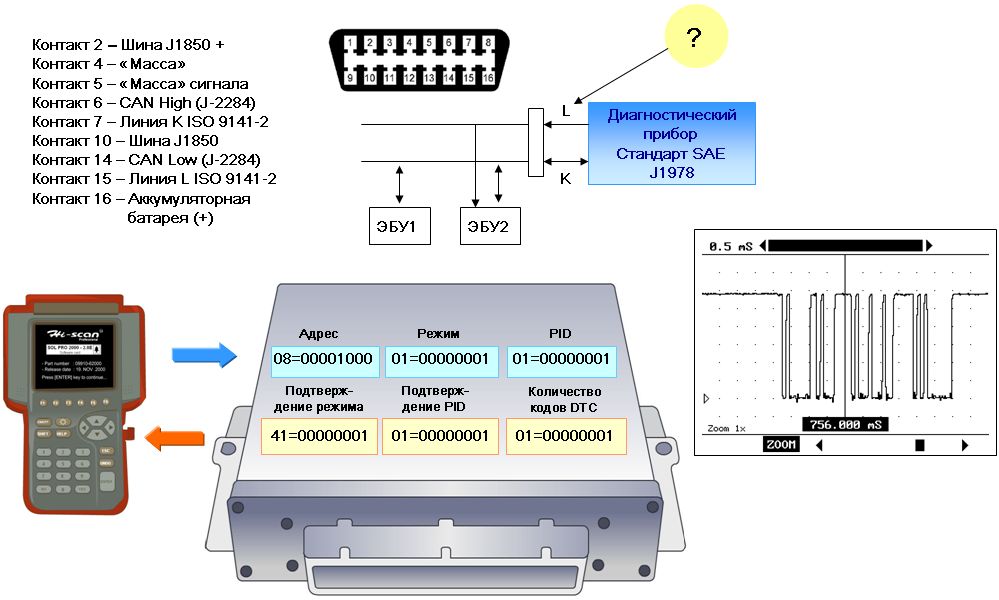
Линия К
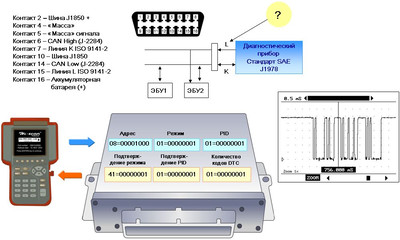
Стандарт ISO 9141/SAE J 1978 определяет протокол для линии K. Линия K — это последовательная шина для обмена данными между диагностическим прибором Hi-scan pro или другим прибором и различными ЭБУ автомобиля. В данном случае в протоколе определено даже назначение контактов. Обратите внимание, что в разъеме канала передачи данных имеются контакты для различных коммуникационных линий. Для диагностики производители могут использовать различные протоколы. Кроме того, могут быть различия в протоколе в разных моделях автомобилей. По существу, подключенный диагностический прибор является просто еще одним устройством, участвующим в обмене данными по сети. Обмен данными между диагностическим прибором и соответствующим блоком управления похож на задавание вопросов и получение ответов на них. Диагностический прибор отправляет запрос блоку управления, а блок управления отвечает или выполняет соответствующие действия. Такой вопрос и ответ представляют собой пакеты данных, которые передаются побитно в определенном кадре данных.
Диагностический прибор отправляет запрос на определенный адрес, например ЭБУ двигателя, затем указывает так называемый режим, который описывает группу функций (например, связанных с кодами диагностики), и идентификатор PID, который определяет функцию в выбранном режиме (например, количество кодов DTC). Затем блок управления выдает определенный ответ с соответствующими данными. На начальных этапах каждый производитель использовал собственные схемы адресации и кодирования данных, но после внедрения бортовых систем диагностики была достигнута унификация формата адресов и данных, касающихся выхлопных газов, что позволило применять сторонние диагностические приборы.
В примере выше ЭБУ двигателя имеет адрес 08, задача считывания кодов диагностики относится к режиму 1, а на первом этапе необходимо выяснить количество имеющихся кодов неисправностей (этому действию соответствует идентификатор PID 01). Получив запрос от диагностического прибора, блок управления предоставляет соответствующий ответ, содержащий подтверждение режима, идентификатор PID запроса и результат. При наличии неисправности ответ может иметь следующий вид:
00 00 0001 0100 0011 для P 0 1 4 3
Два первых блока содержат только по два бита, так как этого достаточно для представления всех возможных вариантов. Примечание: в некоторых моделях автомобилей имеется вторая шина CAN от ЭБУ двигателя (ECM) или ЭБУ силовой передачи (PCM) к универсальному разъему (в моторном отсеке). Эта шина предназначена для перепрограммирования ЭБУ, а не для диагностики.
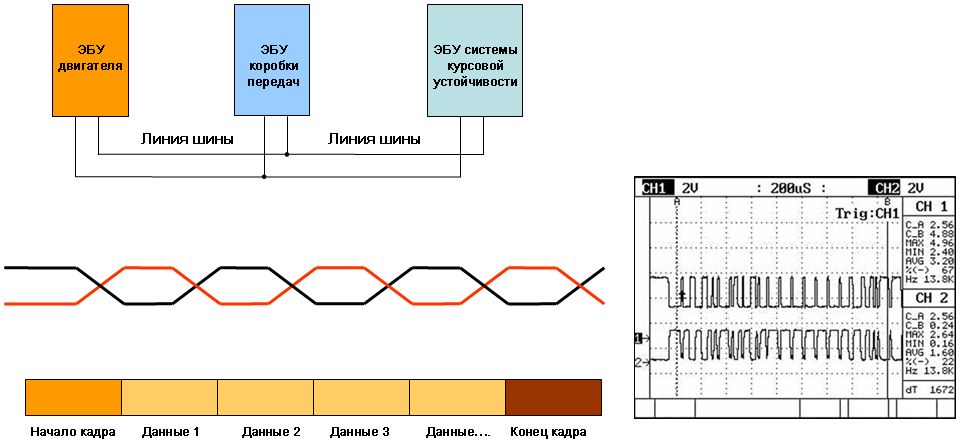
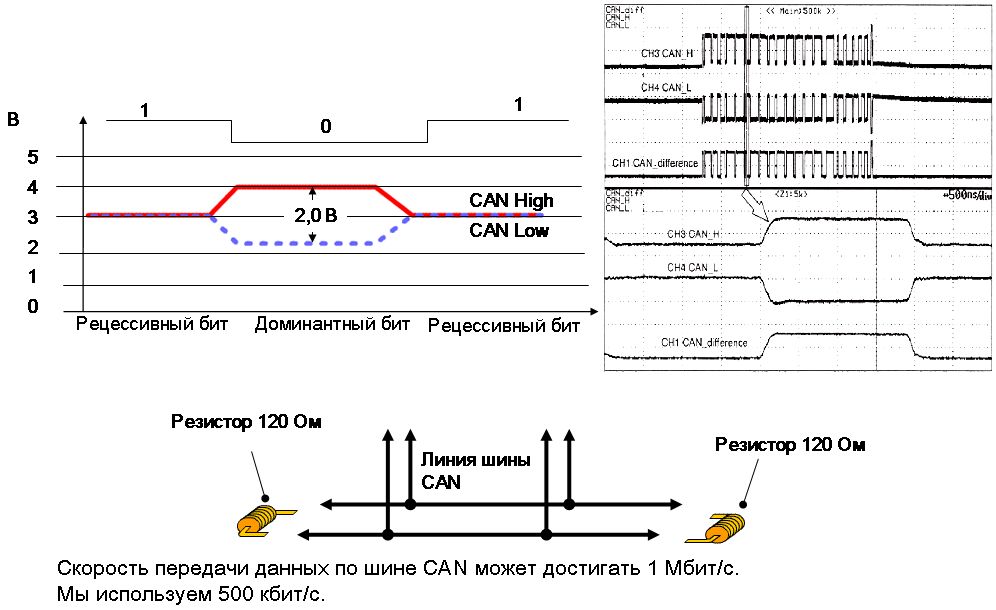
Шина CAN
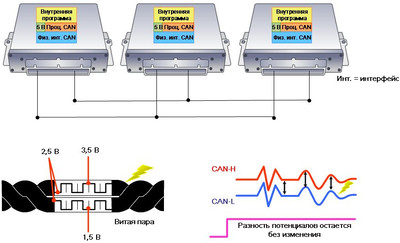
При использовании шины CAN (Controller Area Network) все задействованные ЭБУ подключены только к двум проводам — CAN High и CAN Low. Для передачи информации используется разностный сигнал, т. е. разность напряжений между проводами High и Low. Пропускная способность шины CAN может достигать 1 Мбит/с, но в наших автомобилях применяется фиксированная скорость 500 кбит/с. Очень часто два провода скручены между собой. Это делается для того, чтобы при наличии помех изменение напряжения было одинаковым на обеих линиях. В этом случае разность напряжений не изменяется, и, соответственно, помехи не будут оказывать влияния на состояние бита (1 или 0). Другой способ снижения влияния помех на сигнал CAN заключается в установке нагрузочных резисторов на каждом из концов шины CAN. Сопротивление каждого резистора составляет 120 Ом. Передача данных через шину CAN будет возможна даже в случае повреждения или удаления резисторов. Очевидно, такая ситуация приведет к «странному» поведению системы и возникновению кодов DTC. Обратите внимание на то, что шина отвечает только за передачу и отбор сообщений между ЭБУ. Шина не оказывает влияния на обработку данных. Рассмотрим пример, в котором требуется передать информацию о температуре охлаждающей жидкости двигателя от одного ЭБУ другому. Этот процесс протекает следующим образом. ЭБУ 1 получает аналоговый сигнал от датчика температуры охлаждающей жидкости двигателя. Внутренняя программа ЭБУ преобразует этот сигнал в цифровую форму и обрабатывает его. Чтобы отправить данные на другой ЭБУ, внутренняя программа передает цифровые данные процессору CAN. Процессор CAN преобразует данные в формат CAN и передает их физическому интерфейсу CAN, который создает сигналы определенного уровня на линии шины. Физические интерфейсы других узлов принимают сигнал. Сигнал преобразуется обратно в форму, понятную процессору CAN. Процессор проверяет приоритет и релевантность сигнала для соответствующего ЭБУ. Если информация релевантна, она передается внутренней программе ЭБУ для дальнейшей обработки. Если нет, она игнорируется.
Передача данных по шине CAN
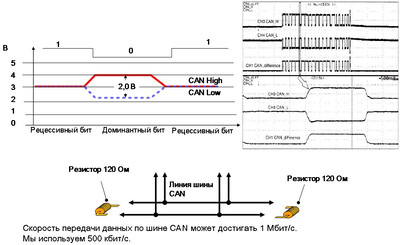
Для создания цифрового сигнала контроллер CAN изменяет разность напряжений между линиями High и Low. Значение бита 1 (рецессивный) представлено напряжением 2,5 В на обеих линиях =>разность напряжений составляет 0 В, а разность с «массой» — 2,5 В для каждой линии. Значение бита 0 (доминантный) представлено напряжением 3,5 В на линии High и 1,5 В на линии Low => разность напряжений между ними составляет 2 В. В случае разрыва одной из линий контроллер CAN переходит в отказоустойчивый режим, в котором для передачи данных используются низкое и высокое напряжение на оставшейся линии. Резисторы на линии служат для двух основных целей: не допустить интерференции сигналов на двух линиях, так как каждый из проводов при скорости передачи данных 500 000 бит в секунду действует в качестве высокочастотной антенны. Обеспечивать надлежащий уровень напряжения на сигнальных линиях.
Схема «монтажное И»/кадр данных

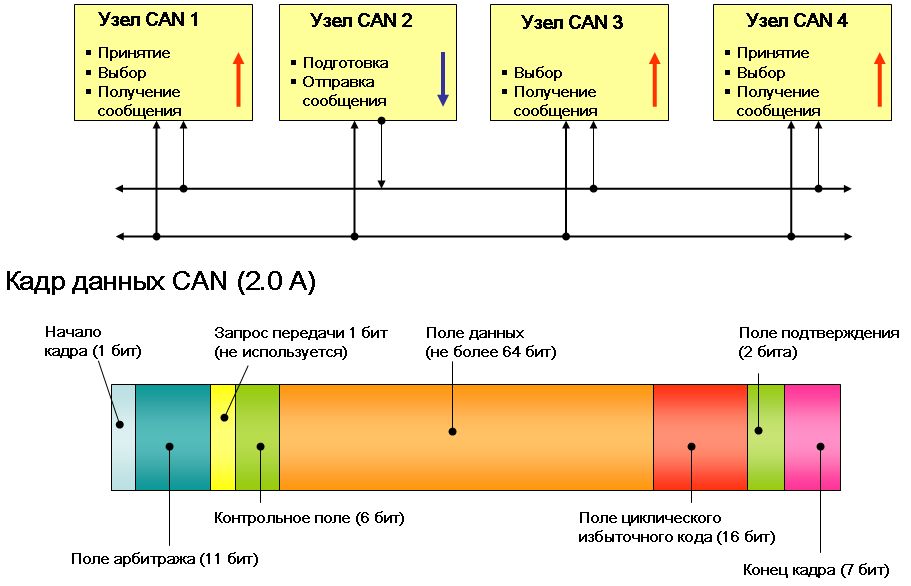
Чтобы понять, как осуществляется арбитраж, необходимо знать, что в шине CAN используется так называемая схема «монтажное И». Это означает, что все узлы одновременно отправляют и принимают сигнал. Любой узел, отправляющий сообщение, одновременно проверяет наличие сигнала и сравнивает его с отправляемым сигналом. Как происходит передача сообщения.
Подготовка: контроллер CAN обрабатывает данные, полученные от микропроцессора, и подготавливает их к отправке.
Отправка сообщения: трансивер CAN получает данные от контроллера CAN, преобразует их в электрические сигналы и отправляет их на шину передачи данных.
Получение сообщения: все остальные узлы, подключенные к шине, и сам отправитель получают данные.
Выбор: каждый блок управления проверяет содержимое полученного сообщения и определяет, релевантно оно или нет.
Принятие:
Если сообщение является релевантным для блока управления, оно принимается на обработку.
Бит начала кадра сообщает всем блокам управления о том, что начинается новое сообщение.
Поле арбитража играет важную роль, поскольку эта последовательность битов определяет приоритет сообщения. Подробно процесс арбитража будет рассмотрен далее. Поле запроса передачи (RTR) длиной 1 бит больше не используется. Ранее этот бит использовался для запроса информации от другого ЭБУ. Контрольное поле содержит сведения об общей длине сообщения, поскольку она может быть переменной. Это один из признаков, используемых для проверки правильности приема. Поле данных содержит сведения, которые требуется передать. Длина поля данных может быть разной. Максимальная длина составляет 8 байт = 64 бита. Еще одним средством проверки правильности приема сообщения служит поле циклического избыточного кода. Поле подтверждения является сигналом подтверждения правильности и полноты приема сообщения. Конец кадра указывает на конец сообщения. В настоящее время в основном используются 2 версии высокоскоростной шины CAN, 2.0 A и 2.0 B, различающиеся количеством бит, выделенных для идентификатора: 11 бит в версии 2.0 A и 29 бит в версии 2.0 B.
Арбитраж
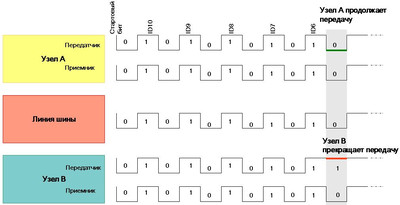
Процесс арбитража происходит следующим образом. В данном примере два ЭБУ (узла) одновременно начинают передавать сообщение. Узел A отправляет доминантный бит (0) и получает от шины сигнал 0. Аналогичное верно и для узла B. Если оба узла обнаружат на шине то же самое значение, которое они отправили на шину, оба узла продолжат отправку сообщения. Затем оба узла отправляют/получают сигнал 1. Как и ранее, они продолжают отправку. Это будет продолжаться до тех пор, пока оба узла отправляют одинаковое значение. Однако затем узел A отправляет 0, а узел B — 1. Узел A продолжит отправку, поскольку отправляемый и получаемый сигналы совпадают. Однако на узле B возникнет другая ситуация. Этот узел отправил 1, а получает 0. Поскольку 0 имеет более высокий приоритет чем 1, узел B распознает, что на шине имеется более важное сообщение, прекратит передачу и перейдет в режим только приема. Основное преимущество этого метода заключается в том, что «победитель» арбитража просто продолжит отправку своего сообщения без каких-либо задержек. Это называется доступом к информации без ее разрушения (NDA). После такого арбитража передача данных будет продолжаться даже в том случае, если на шине появится сообщение с более высоким приоритетом. Процесс арбитража обеспечивает предсказуемое максимальное время задержки важного сообщения (это время примерно равно времени передачи одного сообщения).
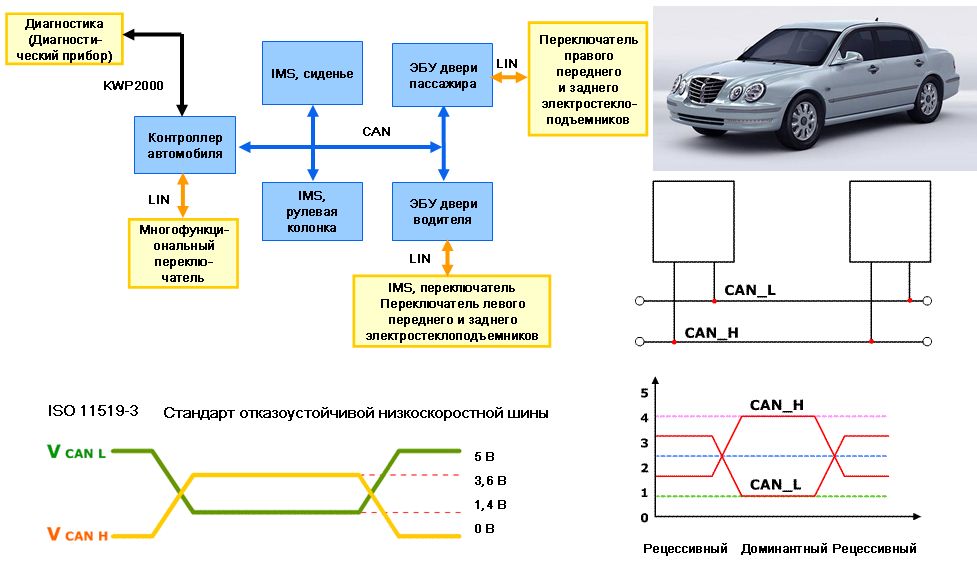
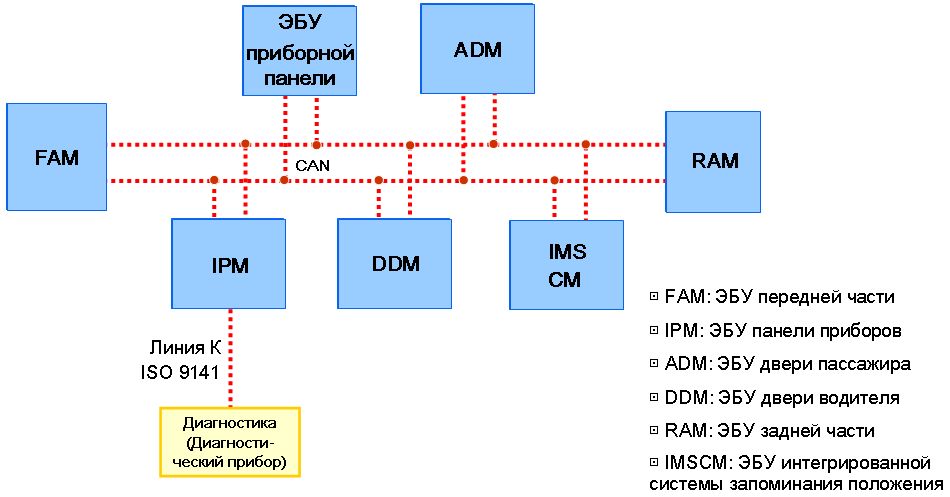
Низкоскоростная шина CAN в автомобиле OPIRUS

Существуют различные типы шин CAN, что отражено в их классификации. До этого слайда приводилось описание высокоскоростной шины CAN (версия 2.0 A), которая используется для передачи данных трансмиссии или систем безопасности, таких как система ESP. Другие версии шин CAN выполняют аналогичную функцию и имеют такой же принцип работы. Но есть и некоторые отличия, которые описаны далее. Очевидно, что основное отличие заключается в скорости передачи данных, но также отличаются и используемое напряжение, количество и местоположение резисторов. Низкоскоростная шина CAN используется для не критических по времени систем, например систем обеспечения комфорта. Различные версии низкоскоростной шины определены в стандартах ISO 11519-2 и ISO 11519-3. Например, низкоскоростная шина CAN используется в новом автомобиле Grandeur в системе обеспечения комфорта для обмена данными с интегрированной системой запоминания положения.
Примечание. Кроме этих основных версий шины CAN, существуют и другие версии, например TT CAN (Time Triggered CAN), в которой также используются фиксированные временные кадры.
Шина LIN

Аббревиатура LIN обозначает Local Interconnect Network (Локальная коммутируемая сеть). К типичным применениям шины LIN относятся законченные узлы, такие как дверной модуль, руль, сиденья, управление климатом и светом, датчик дождя или переключатели. Применение недорогой системы LIN дает возможность использовать в таких узлах электронно-механические компоненты, такие как интеллектуальные датчики, исполнительные механизмы или освещение. Их можно легко подключить к сети автомобиля и использовать для диагностики и обслуживания.
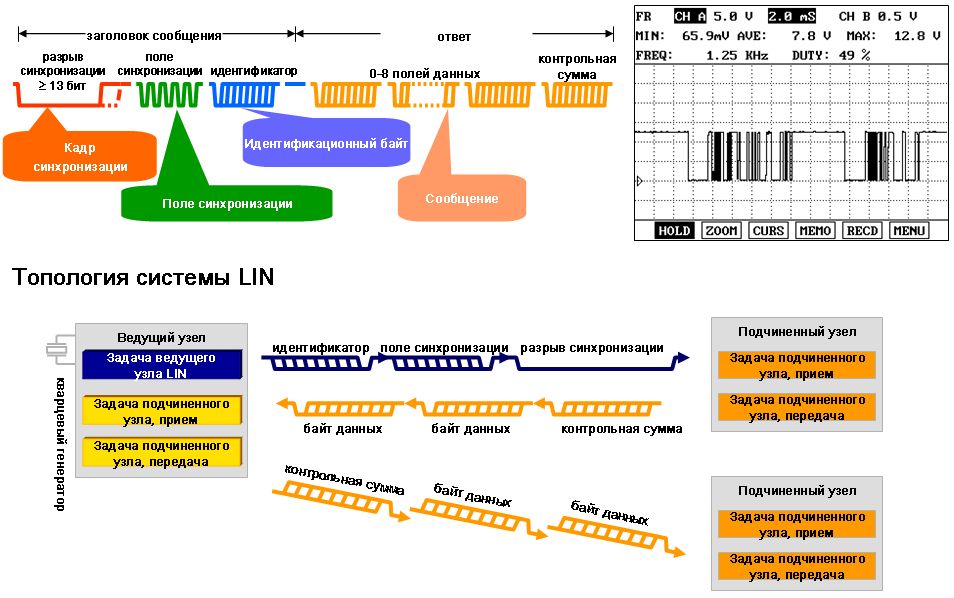
Кадр данных LIN
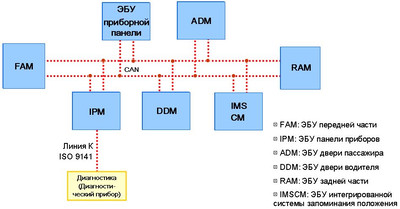
Для передачи данных в системе LIN используется однопроводная шина с напряжением 12 В. В этой системе применяется синхронная передача данных. Для синхронизации используется определенная часть сообщения, поле синхронизации. Сеть LIN состоит из одного ведущего и нескольких подчиненных узлов. Это означает, что весь обмен данными проходит через ведущий узел, который обеспечивает управление. Максимальная скорость передачи данных в сети LIN составляет 20 кбит/с. Поле контрольной суммы позволяет следить за отсутствием ошибок при передаче данных. Стандарт LIN включает спецификацию протокола передачи и среды передачи. Стандарт LIN гарантирует возможность взаимодействия сетевых узлов с точки зрения программного и аппаратного обеспечения и электромагнитную совместимость. Первой моделью KIA, в которой была применена шина LIN, стала OPIRUS GH. Шина LIN используется для обмена данными между ЭБУ электрооборудования автомобиля (BCM) и многофункциональным переключателем (см. схему). В такой топологии шина LIN используется в качестве дополнительной шины. Основной шиной передачи данных служит шина CAN.
Коммуникационная система Carnival/Sedona (VQ)
В этой системе для снижения чувствительности к помехам используется двухпроводная шина типа «витая пара». Скорость передачи данных составляет 62,5 кбит/с. Для передачи данных применяется дифференциальный метод. Логической единице соответствует напряжение 5 В на шине A и 0 В на шине B. Логическому нулю соответствует напряжение 2,5 В на обеих шинах.
Эта система с несколькими ведущими узлами на основе протокола CSMA/CD. При арбитраже не происходит повреждения информации. С целью обеспечения сохранности данных добавлен циклический избыточный код размером 8 бит.
Обмен данными между ЭБУ двери водителя, ЭБУ двери пассажира и ЭБУ приборной панели осуществляется через двухпроводную шину с асинхронной передачей данных.
Примечание. Обмен данными между ЭБУ двери водителя и ЭБУ электростеклоподъемников осуществляется по шине на основе интерфейса UART (Universal Asynchronous Receiver Transmitter) с использованием симплексной связи.
Поиск неисправностей
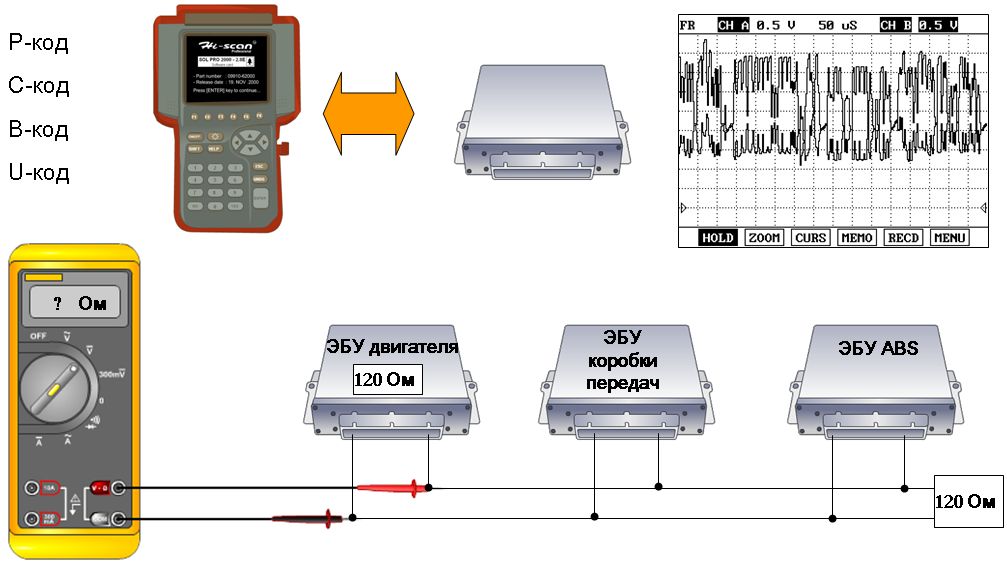
Поиск неисправностей в системах на основе шин. Несмотря на сложность таких систем поиск неисправностей в них очень похож на поиск неисправностей в традиционных системах. Некоторые системы имеют функцию самодиагностики. Коды неисправностей можно считать с помощью диагностического прибора Hi-scan pro. Для некоторых моделей требуется CAN-адаптер (не требуется для прибора NGS). При наличии неисправности в системе обычно выдается код неисправности. В случае неисправности в высокоскоростной шине CAN код может начинаться с буквы U вместо P, например U 0001: нарушение работоспособности шины CAN. В случае низкоскоростной шины CAN код может начинаться с B. Например, B1605: таймаут шины CAN между BCM и DDM.
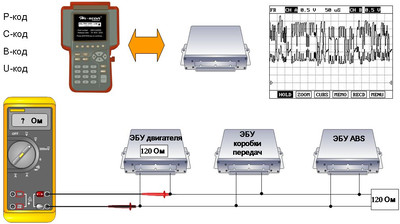
Для большинства сетевых систем имеются только общие образцы форм сигналов, но нет образцов для конкретных сообщений. Проверка формы сигнала — это только быстрая проверка состояния шины. В качестве образца можно использовать форму сигнала высокоскоростной шины CAN. Кроме того, можно проверить и измерить сопротивление разъемов и проводов аналогично тому, как это делается в традиционных системах. В высокоскоростной шине CAN необходимо также проверить нагрузочные резисторы. Если они исправны, сопротивление всей системы должно быть равно 60 +/- 5 Ом, а сопротивление одного резистора 120 +/- 10 Ом. Еще один простой способ проверки — проверка входа или выхода других систем, связанных с проверяемой шиной. Иными словами, следует попробовать другой сигнал, передаваемый по проверяемой шине. Например, если электростеклоподъемник на двери пассажира не реагирует на переключатель на стороне водителя, можно проверить возможность управления электроприводом зеркала на двери пассажира. Если он работает, это означает отсутствие неисправности самой шины, так как данные передаются по шине. Если соответствующий сигнал не передается, можно проверить шину с использованием традиционных методов. Проверка сопротивления и напряжения и проверка базовой формы сигнала с помощью осциллографа. Этим методом можно локализовать неисправность, даже не обладая глубокими знаниями о самой шине.
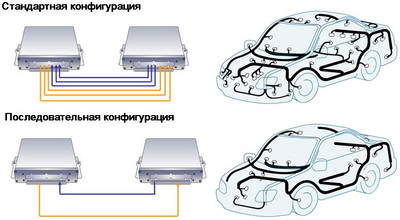
Ремонт жгута проводов шины CAN

Ремонт шины CAN. Необходимо строго соблюдать порядок ремонта, описанный в руководстве по ремонту. В частности, при ремонте высокоскоростной системы необходимо быть предельно внимательным во избежание проблем, вызываемых помехами или интерференцией.
|
| Категория: Диагностические протоколы | Добавил: admin (06.11.2016)
|
| Просмотров: 2938
| Рейтинг: 0.0/0 |
|